4. Автопилот ракеты 9М37 ЗРК «Стрела-10»
1. Назначение, состав и размещение
автопилота
Наведение ракеты на цель осуществляется системой управления ЗРК, которая
определяет взаимное положение цели и ракеты и вырабатывает команды управления
полетом ракеты.
В ЗРК «Стрела-10» применена пассивная система
самонаведения.
Самонаведение - управление полетом ракеты осуществляется
командами, вырабатываемыми на борту ракеты. Пассивная система - цель ничем не
облучается, а ГСН использует энергию, излучаемую целью – инфракрасную или
фотоконтрастную.
Система управления ЗРК «Стрела-10» включает в себя ГСН,
рассмотренную на предыдущем занятии, и автопилот.
Автопилот
9В612 предназначен для преобразования
управляющих сигналов, поступающих с ГСН, в соответствующие углы поворота
рулей.
В состав
автопилота входят (рис. 1) блок электроники и блок рулевых машин
(БРМ).
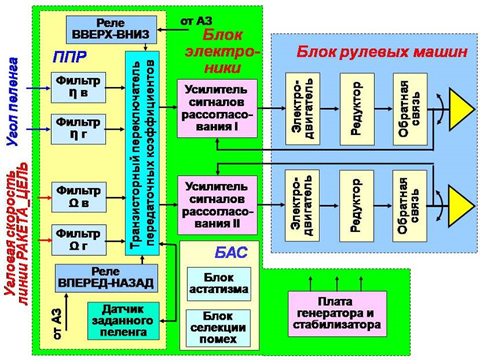
Рис. 1.
Функциональная схема автопилота
Конструктивно автопилот размещается во втором отсеке
ракеты вместе с контактным датчиком цели (КДЦ).
Технические
характеристики:
- максимальное отклонение рулей -
±15°;
- зона нечувствительности рулей -
±0,3°;
- максимальная скорость отклонения рулей - 120
°/с;
- тип рулевого привода – двухканальный
электрический.
2. Назначение и общее устройство элементов
автопилота
Блок
электроники предназначен для
формирования режимов наведения ракеты, преобразования управляющих сигналов и
усиления их до величины, необходимой для работы электродвигателей
БРМ.
Состав блока
электроники:
- плата переключения режимов
(ППР);
- два усилителя сигналов рассогласования
(УСР);
- блок астатизма и селекции (БАС);
- плата генератора и стабилизатора
(ПГС).
Плата
переключения режимов включает:
- четыре фильтра сигналов управления и сигналов
пеленга;
- транзисторный переключатель передаточных
коэффициентов;
- датчик заданного пеленга;
- реле режимов ВПЕРЕД-НАЗАД,
ВВЕРХ-ВНИЗ.
Плата переключения режимов отфильтровывает управляющие
сигналы от шумов и с помощью транзисторного переключателя устанавливает
коэффициенты передачи этих сигналов, а также определяет заданный
пеленг.
Датчик
заданного пеленга обеспечивает ракете
на начальном участке такую траекторию полета, при которой исключается
перезахват горизонта ГСН и касание ракетой земли.
Реле
режимов обеспечивают формирование
режимов наведения ракеты ВПЕРЕД–НАЗАД, ВВЕРХ-ВНИЗ в зависимости от параметров
движения цели и углов возвышения ПУ.
Усилители
сигналов рассогласования обеспечивают
усиление сигнала рассогласования до величины, необходимой для управления
электродвигателями рулевых машин.
Блок
астатизма и селекции включает в себя
блок астатизма и плату селекции помех.
Блок астатизма обеспечивает запоминание ГСН направления
и скорости движения цели в случае кратковременного пропадания сигнала от нее.
Плата селекции помех служит для отстройки ГСН от оптических
помех.
Плата
генератора и стабилизатора, работающая
от бортового блока питания ракеты, обеспечивает питанием элементы блока
электроники.
Блок рулевых машин (БРМ) предназначен для
преобразования управляющих сигналов
в соответствующие углы поворота рулей.
В состав БРМ входят:
- две рулевые машины;
- две пары рулей.
Каждая рулевая машина, состоящая из электродвигателя,
редуктора и потенциометра обратной связи, управляет двумя аэродинамическими
рулями, закрепленными на валу
редуктора.
Рули являются управляющим органом
ракеты.
Исполнительным элементом привода рулей является
электродвигатель постоянного тока.
3. Принцип действия автопилота
Управляющие сигналы по угловой скорости линии
РАКЕТА–ЦЕЛЬ Ώг и Ώв и по пеленгу ηг и ηв, вырабатываемые ГСН, поступают в
плату переключения режимов. В ней
сигналы отфильтровываются от шумов и проходят через транзисторный переключатель,
который устанавливает коэффициенты передачи этих сигналов и определяет заданный
пеленг полета ракеты.
В зависимости от направления, высоты полета цели и
различных углов возвышения ПУ по сигналу с аппаратуры запуска с помощью
соответствующих реле формируются режимы
управления: ВПЕРЕД–НАЗАД, ВВЕРХ-ВНИЗ.
С выхода транзисторного переключателя сигналы поступают
на вход усилителей сигналов
рассогласования (УСР), где они усиливаются до необходимой величины и
поступают на БРМ.
При поступлении сигнала с УСР якорь электродвигателя
начинает вращаться. Частота и направление его вращения зависят от величины и
полярности управляющих сигналов. Вращение якоря через редуктор передается на
рули, заставляя их поворачиваться в нужном направлении и с необходимой
скоростью.
Одновременно с поворотом рулей перемещается движок
потенциометра обратной связи, с которого снимается напряжение обратной связи и
подается в УСР. Это позволяет рулям ракеты отработать всю величину управляющего
сигнала и свести его к нулю.

Тестовое задание
Получения ЦУ от ПУ-12 и управления работой АЗ
Подрыва боевой части
Преобразования управляющих сигналов поступающих с ГСН в соответствующие углы поворота рулей
Командами, вырабатываемыми аппаратурой оценки зоны.
Командами, вырабатываемыми на борту ракеты.
Все выше перечисленные пункты.
Во втором отсеке.
В третьем отсеке.
В четвертом отсеке.
Ступенчатого изменения коэффициента передачи сигналов управления в соответствии с заданной программой.
Усиления управляющих сигналов до величины, необходимой для нормальной работы электродвигателей БРМ.
Все выше перечисленные пункты.
Головка самонаведения и блок рулевых машин;
Следящий координатор цели и блок рулевых машин;
Блок электроники и блок рулевых машин.
±15°;
±20°;
±25°.