11. Система прицеливания и привод пусковой установки ЗРК «Стрела-10»
1. Средства прицеливания
Средства
прицеливания БМ - визир грубой наводки
и оптический визир 9Ш127. Оба визира размещены в башне.
Визир грубой
наводки предназначен для грубого
наведения ПУ на цель, что обеспечивает попадание цели в поле оптического визира.
Он представляет собой рычаг, связанный с люлькой и имеющий угломестную шкалу. На
конце рычага установлено прицельное кольцо.
Оптический
визир предназначен
для:
- точного наведения ПУ на цель, чем обеспечивается
попадание цели в поле зрения ГСН ракеты;
- определения надежности захвата цели
ГСН;
- определения момента пуска
ракеты;
- ввода углов упреждения ПУ перед пуском (в ручном
режиме);
- наблюдения в поле зрения визира сигналов пассивного
радиопеленгатора.
Оптический визир состоит из головной и средней частей и окуляра (рис.1) и размещен перед оператором. Часть визира, расположенная снаружи башни, закрыта кожухом с откидной крышкой. Крышка открывается оператором с помощью рычага.
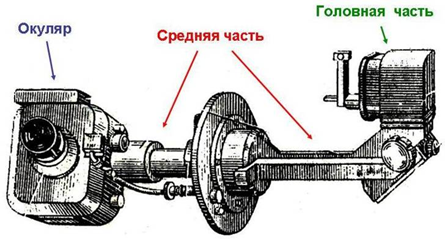
Рис. 1.
Оптический визир
Поле зрения визира по азимуту составляет 35°, по углу
места - 28°; увеличение - 1,8 раза,
напряжение питания - 24 В.
В поле зрения
оптического визира оператор наблюдает
(рис. 2):
- кольцо - перекрестие;
- следящую марку;
- три кольца упреждений;
- световые сигналы ЗОНА, НИЗ, ОБЪЕКТ СПРАВА, ОБЪЕКТ
СЛЕВА.
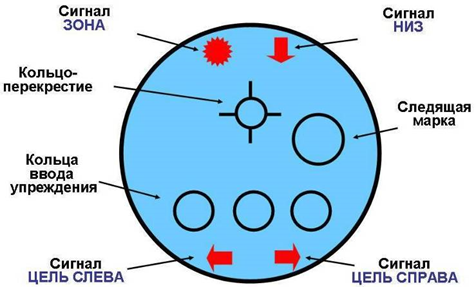
Рис. 2.
Поле зрения оптического визира
Кольцо -
перекрестие указывает, куда направлена ось контейнера с ракетой, т. е. куда
произведено прицеливание.
Следящая
марка показывает, куда направлена ось
ГСН. Эта марка при включении режима БОРТ совмещается с кольцом-перекрестием, при
включении режима СЛЕЖЕНИЕ перемещается, охватывая цель, а при выключении питания
аппаратуры запуска может занимать любое положение в поле зрения
визира.
Кольца
упреждений предназначены для ввода
угловых упреждений в ручном режиме работы приводов
наведения.
Световой
сигнал ЗОНА загорается при включенной
АОЗ, если цель вошла в зону пуска ракеты.
Световой
сигнал НИЗ загорается при угле места
люльки 20° и менее. В этом случае при пуске ракеты необходим ввод
вертикального
упреждения.
Световые
сигналы ОБЪЕКТ СЛЕВА, ОБЪЕКТ СПРАВА
являются сигналами пассивного радиопеленгатора и указывают, в какой стороне
находится цель.
2. Аппаратура навигации
В БМ «Стрела-10» используется танковая навигационная аппаратура
ТНА-3. Эта аппаратура является счетно-решающим комплексом и предназначена для непрерывной выработки
текущих координат, дирекционного угла БМ и угла направления на пункт назначения
(рис. 3).

Рис.
3. Дирекционные углы БМ и
ПУ
ТНА-3
обеспечивает:
- установку и считывание прямоугольных координат и дирекционного угла
БМ;
- установку и считывание разностей координат пункта
назначения и БМ в пределах 100
км;
- считывание дирекционного угла на пункт
назначения;
- введение корректуры пути на юз, пробуксовку и
неровности местности.
В
состав ТНА входят :
- датчик пути;
- координатор;
- курсоуказатель;
- гирокурсоуказатель;
- пульт управления;
- преобразователь ПТ - 200Ц.
Для приема целеуказания и ориентирования ПУ при боевой
работе совместно с ТНА-3 работает указатель
азимута.
Датчик
пути установлен в отсеке главной
передачи МТ-ЛБ. Он вырабатывает электрические сигналы, пропорциональные
пройденному пути и скорости
БМ.
Координатор
(рис. 4) установлен справа от командира и предназначен для ввода исходных
данных, а также для выработки и индикации текущих координат движущейся БМ, ее
дирекционного угла и дирекционного угла на пункт назначения. Кроме этого
координатор обеспечивает проверку работоспособности аппаратуры.

Рис.
4. Координатор
ТНА-3
Курсоуказатель
установлен справа перед механиком - водителем и предназначен для индикации
дирекционного угла машины (рис.5).

Рис.
5.
Курсоуказатель
Гирокурсоуказатель расположен слева от оператора на дне БМ. Он предназначен
для измерения дирекционного угла машины и представляет собой трехстепенной
гироскоп. Он сохраняет в пространстве заданное перед пуском направление вращения
своей оси, т. е. продольной оси БМ, которое она имела до начала движения. При
движении БМ углы отклонения ее продольной оси от исходного положения измеряются,
и определяется текущий дирекционный угол.
Пульт
управления расположен рядом с
координатором и предназначен для настройки
гирокурсоуказателя.
Преобразователь ПТ-200Ц установлен в кормовой части БМ и предназначен для
выработки переменного тока частотой 400 Гц и напряжением 36
В.
Работа
ТНА-3.
Перед началом движения в аппаратуру вводятся исходные
значения координат и дирекционного угла БМ, корректура пути на юз, пробуксовку и
рельеф местности. При необходимости вводится и разность координат пункта
назначения и местоположения БМ.
Информация о пройденном пути поступает от ходовой части
через гибкий валик на датчик пути, где она преобразуется в электрический сигнал.
Этот сигнал поступает в координатор. Кроме этого, в координатор из
гирокурсоуказателя поступает информация о текущем дирекционном угле БМ.
Координатор на основании входных данных постоянно
определяет координаты и дирекционный угол движущейся БМ, которые отображаются на
табло и указателях.
Если была введена разность координат пункта назначения и
местоположения БМ, то координатор определяет и дирекционный угол на пункт
назначения.
Помимо ТНА-3 в БМ имеется и указатель азимута (рис. 6).
Он предназначен для ориентирования ПУ и установлен перед оператором слева от
оптического визира. На указателе имеется шкала азимута в градусах и делениях
угломера и две стрелки.
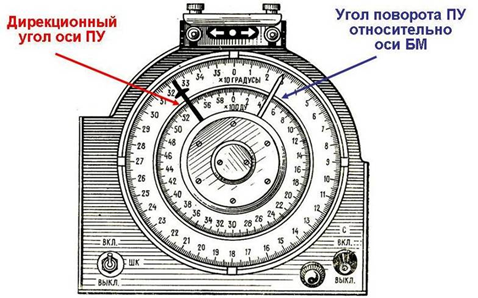
Рис.6. Указатель
азимута
Белая стрелка показывает угол поворота ПУ относительно
оси БМ, а черная стрелка – дирекционный угол продольной оси башни. При движении
БМ указатель азимута работает от ТНА-3, постоянно показывая оператору
дирекционный угол и угол поворота ПУ.
3. Устройство и работа привода
наведения
Электрический
привод пусковой установки предназначен
для перевода ПУ из походного положения в боевое и обратно и вращения ее в
вертикальной и горизонтальной плоскостях.
Привод
состоит из:
- электропривода вертикального наведения
(ВН);
- электропривода горизонтального наведения
(ГН);
- электропривода механизма перевода из походного
положения в боевое и обратно.
Привод
обеспечивает:
- перевод ПУ из походного положения в боевое и
обратно;
- наведение ПУ в вертикальной плоскости в пределах от
-5° до +80° и в горизонтальной плоскости без ограничений;
- автоматическое «слежение» за целью в режиме СЛЕЖЕНИЕ
при сопровождении цели ГСН;
- автоматическую отработку угловых упреждений по команде
ПУСК и торможение ПУ в момент старта ракеты.
Для управления приводами наведения ПУ на цель служит пульт наведения
(ПН).
ПН установлен перед оператором на откидном кронштейне,
который фиксируется защелкой в рабочем положении. На нем размещены две рукоятки
управления ПУ по азимуту и углу места и гашетка включения приводов ВН и
ГН.
Электропривод
ВН представляет собой следящую
систему, которая управляет положением ПУ в вертикальной плоскости
(рис.7).
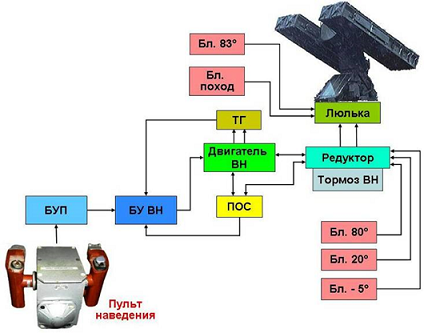
Рис.7. Функциональная схема
привода вертикального наведения
В состав электропривода входят:
- задающий потенциометр, расположенный в пульте
наведения;
- блок управления приводом;
- блок усилителей ВН;
- исполнительный двигатель с тахогенератором (ТГ) и
потенциометром обратной связи (ПОС).
Совместно с приводом ВН работает редуктор ВН, в котором
размещены тормоз и блок микровыключателей.
Задающий потенциометр предназначен для
формирования управляющего сигнала следящей системы.
Блок управления приводами (БУП) предназначен для
предварительного усиления управляющих сигналов по мощности. БУП является общим
блоком для всех электроприводов ПУ. На БУП расположены автоматы защиты сети
(АЗС): ВВ - вращение вертикальное; ВГ - вращение горизонтальное; ВП - вращение
перевода, которые обеспечивают защиту приводов ВН, ГН и механизма
перевода от перегрузок по току. БУП размещен на подвеске справа от сиденья
оператора.
Блок усилителей ВН предназначен для
окончательного усиления сигналов по мощности. Он размещен на подвеске рядом с
БУП.
Исполнительный двигатель с редуктором
предназначен для перемещения люльки по углу места. В редукторе размещены
элементы следящей системы: тахогенератор и потенциометр обратной связи
(ПОС), а также конструктивно размещен блок
микровыключателей.
Электропривод ГН представляет собой следящую систему дистанционного управления вращением ПУ в горизонтальной плоскости (рис. 8). Скорость вращения ПУ задается углом поворота ручек пульта наведения влево (вправо).
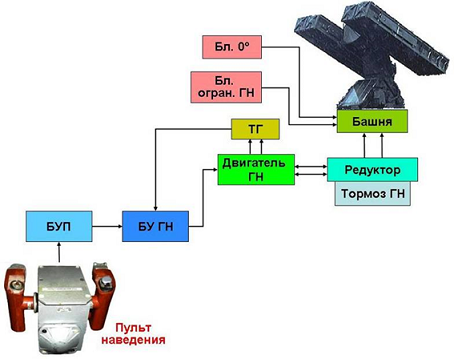
Рис.8. Функциональная схема
привода горизонтального наведения
Все узлы и элементы привода ГН аналогичны узлам и
элементам привода ВН. В состав привода ГН не входит
ПОС.
Совместно с приводом ГН работает редуктор ГН. Редуктор
ГН имеет ручной дублер для вращения ПУ по азимуту вручную.
Для включения приводов необходимо перевести ПУ в боевое положение, включить тумблеры 24 В, 28 В и ПРИВОД на ПО (рис.9) и нажать гашетку на правой ручке ПН.
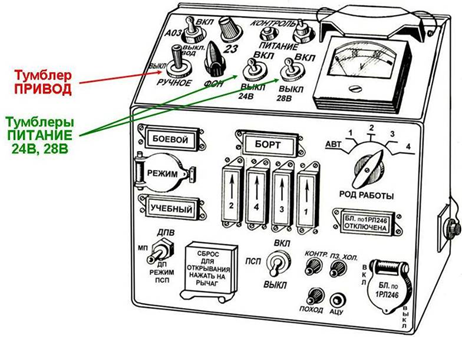
Рис.
9. Пульт
оператора
Приводы наведения ПУ могут работать в полуавтоматическом или автоматическом
режиме.
Основным режимом является
полуавтоматический.
Работа
привода ВН в полуавтоматическом режиме.
При повороте ручек ПН вверх (вниз) от нулевого
положения с задающего потенциометра снимается сигнал управления,
пропорциональный углу поворота ручек, который поступает в блок управления
приводами для предварительного усиления его по мощности.
С БУП сигнал управления поступает в блок усилителей ВН,
где окончательно усиливается по мощности до величины, обеспечивающей
нормальную работу исполнительного двигателя. Усиленный сигнал поступает на
обмотку исполнительного двигателя, который через редуктор поворачивает люльку в
вертикальной плоскости. Одновременно редуктор поворачивает также ось
потенциометра обратной связи (ПОС) на заданный угол. С ПОС снимается
напряжение обратной связи, пропорциональное положению люльки, и подается на
вход усилителя ВН с обратным знаком управляющему сигналу. При достижении люлькой
заданного угла разностное напряжение на выходе усилителя ВН будет равным нулю и
исполнительный двигатель остановится. Кроме того, на вход усилителя поступает
сглаживающее напряжение с тахогенератора, что обеспечивает плавность отработки
люлькой заданного угла.
При отпускании гашетки ПУ затормаживается, а при
отпускании ручек под действием пружины они возвращаются в исходное
положение.
Работа
привода ГН в полуавтоматическом режиме.
При повороте корпуса ПН вправо (влево) от нулевого
положения с задающего потенциометра снимается управляющий сигнал. Цепь
прохождения сигнала аналогична цепи прохождения в приводе ВН, за
исключением отсутствия отрицательной обратной связи. Пусковая установка
отрабатывает задающий сигнал до тех пор, пока оператор не снимет его. При
отпускании ручек ПН корпус его под действием пружины возвращается в
исходное положение.
Угловая скорость
вращения башни ПУ
пропорциональна углу поворота ручек ПН.
Работа
приводов ВН и ГН в автоматическом режиме.
Переход в автоматический режим осуществляется при
автоматическом сопровождении цели ГСН включением на пульте оператора ПО-2
тумблера СЛЕЖЕНИЕ в положение АВТОМАТ (рис.10) и удержанием гашетки в
нажатом положении. При этом управляющий сигнал поступает не с ПН, а с ГСН
ракеты. В остальном работа приводов аналогична работе в полуавтоматическом
режиме.

Рис.
10. Пульт оператора
ПО-2
Таким образом, при боевой работе оператор в режиме БОРТ
рукоятками управления ПН наводит ПУ на цель и переходит в режим СЛЕЖЕНИЕ. При
этом сигнал для управления приводами поступает с ГСН ракеты, и ПУ будет
автоматически сопровождать цель. В режиме ПУСК приводы автоматически
отрабатывают углы упреждения, выработанные в АОЗ, и разворачивают ПУ в упрежденную точку.
В
полуавтоматическом режиме тумблер
СЛЕЖЕНИЕ на ПО-2 переключается в положение РУЧНОЕ. Оператор все операции по
сопровождению цели в режиме СЛЕЖЕНИЕ и вводу углов упреждения в режиме ПУСК
осуществляет вручную.
Электропривод
механизма перевода обеспечивает перевод
ПУ из походного положения в боевое и обратно. Он установлен в башне ПУ сзади
оператора. Работу механизма обеспечивает электродвигатель.
Механизм перевода имеет ручной дублер, позволяющий
расчету с помощью специальной рукоятки вручную переводить ПУ в боевое и походное
положения. Для этого необходимо вставить рукоятку в гнездо хвостовика ручного
дублера (рис.11) и включить тумблер ПРИВОД на ПО. Вращением рукоятки ручного
дублера по ходу часовой стрелки (против хода часовой стрелки) перевести ПУ в
походное (боевое) положение. После загорания лампы ПОХОД (подсветки шкалы
вольтметра) на ПО рукоятку повернуть дополнительно на 0,5-1 оборот.
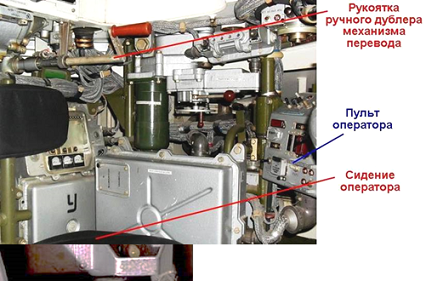
Рис.11. Рукоятка ручного дублера
механизма перевода
После завершения перевода ПУ в боевое или походное
положение осуществляется ее стопорение стопорами.
4. Система электропитания
Система
электропитания (СЭП) предназначена для
обеспечения электрической энергией всей аппаратуры боевой машины.
Состав
СЭП:
- генератор Г6,5С;
- две аккумуляторные батареи
6СТ-140;
- реле-регулятор Р-10ТМУ;
- фильтр радиопомех Ф5;
- коммутационное устройство;
- предохранитель ИП-150.
Генератор
Г6,5С является основным источником
электроэнергии. Он установлен слева от рабочего места командира и соединен
ременной передачей с валом двигателя БМ. Генератор вырабатывает напряжение 28 В,
его мощность - 6,5 кВт.
Аккумуляторные батареи 6СТ-140 являются резервным источником питания. Напряжение одной
батареи 12 В. Батареи соединены последовательно, суммарное напряжение на двух
батареях составляет 24 В. Емкость каждой батареи 140 А/час. При работающем
базовом двигателе АКБ подключаются к генератору и работают в режиме подзаряда.
При неработающем двигателе аккумуляторные батареи работают в режиме разряда (при
включенной аппаратуре). Батареи установлены в кормовой части БМ над АКБ
МТ-ЛБ.
Реле-регулятор Р-10ТМУ предназначено для автоматического поддержания
напряжения генератора в пределах 26,5-28,5 В при изменении оборотов двигателя.
Установлено справа от оператора на борту БМ.
Фильтр
радиопомех Ф5 служит для подавления
радиопомех, создаваемых генератором. Установлен рядом с
реле-регулятором.
Коммутационное устройство предназначено для включения СЭП и переключения режимов
работы. Состоит из выключателя массы и трех контакторов. Выключатель массы с
вольтметром ВА-180 установлен на щитке слева перед механиком-водителем.
Контакторы размещены справа от оператора рядом с реле-регулятором. С помощью
вольтметра ВА-180 контролируется напряжение на АКБ и наличие зарядного
тока.
Предохранитель ИП-150 служит для защиты АКБ в случае короткого замыкания
цепи.
При включенном базовом двигателе БМ СЭП работает от
генератора, время работы неограниченно. Если базовый двигатель БМ не
используется, то СЭП работает от
АКБ, время работы – несколько часов.
В БМ предусмотрена возможность подключения к СЭП системы внешнего электропитания 9И111
(рис. 12). Подключение производится с помощью кабеля, который подсоединяется
к разъёму на правом борту БМ. Внешний источник питания заменяет генератор
Г6,5С.
При работе от ВИП подзаряжаются только АКБ СЭП пусковой
установки. Подзаряд батарей базовой машины не осуществляется.

Рис. 12. Система внешнего электропитания 9И111

Тестовое задание
Точного наведения ПУ на цель; определения надежности захвата цели ГСН; определения момента пуска ракеты; ввода углов упреждения ПУ перед пуском (в ручном режиме); наблюдения сигналов ПРП.
Точного определения пассивным радиопеленгатором (ПРП) воздушной цели; определения цели относительно границ зоны пуска; ввода упредительной точки воздушной цели.
Точного наведения ПУ в упрежденную точку, определения канала работы ГСН ; определения цели относительно границ зоны пуска; ввода упредительной точки воздушной цели.
Счетно-решающее устройство предназначенное для непрерывной выработки сигнала ЗОНА для определения границ зоны пуска комплексом.
Счетно-решающий комплекс, предназначенный для непрерывной автоматической выработки текущих координат, дирекционного угла БМ и угла направления на пункт назначения.
Счетно-решающий комплекс, предназначенный для непрерывного автоматического опознавания воздушной цели.
Указатель угла места.
Указатель дальности.
Указатель скорости.
задающий потенциометр; блок управления приводом; блок усилителей ВН; исполнительный двигатель с тахогенератором (ТГ) и потенциометром обратной связи (ПОС).
задающий потенциометр; блок управления приводом; блок усилителей ВН; исполнительный двигатель с обратной связи (ПОС).
задающий потенциометр; блок управления приводом; блок усилителей ВН; исполнительный двигатель.
Окончательного усиления сигналов по амплитуде.
Окончательного усиления сигналов по частоте.
Окончательного усиления сигналов по скорости.
по азимуту - 25°; по углу места - 18°; увеличение - 2,8 раза; напряжение питания – 12 В.
по азимуту - 45°; по углу места - 38°; увеличение - 2,8 раза; напряжение питания – 32 В.
по азимуту - 55°; по углу места - 48°; увеличение - 1,8 раза; напряжение питания – 16 В.
Датчик времени, навигатор, курсоуказатель, гирокурсоуказатель, пульт наведения, преобразователь ПТ - 300Ц.
Датчик пути, координатор, курсоуказатель, гирокурсоуказатель, пульт управления, преобразователь ПТ - 200Ц.
Датчик дальности, координатор, азимутальный датчик, угломестный датчик, пульт управления, преобразователь ПТ 200Ц.
Перевода пассивного радиопеленгатора (ПРП) в рабочее положение, наведения НРЗ нацель для ее опознавания.
Перевода ПУ из походного положения в боевое и обратно, наведение башни в горизонтальной плоскости, наведение люльки в вертикальной плоскости.
Управления БМ при пуске ракеты, стопорения башни в походном положении, перевода вспомогательных систем в боевое положение.
Управления приводами вертикального наведения (ВН) и приводами горизонтального наведения (ВН).
Управления приводом вертикального наведения (ВН), приводом горизонтального наведения (ВН), приводом перевода.
Предварительного усиления управляющих сигналов по мощности.
Обеспечения электрического торможения двигателя привода ВН при подходе люльки к минимальному углу 20°.
Выработки сигнала «НИЗ» при угле люльки 20° и меньше.
Отключения привода ВН на максимальном угле 20°.