3. Оптическая ГСН ракеты 9М37 ЗРК «Стрела-10»
1. Назначение, состав, основные характеристики
оптической головки самонаведения
Пассивная двухдиапазонная оптическая головка самонаведения (ГСН) 9Э47
является основным элементом ракеты и предназначена для захвата цели, ее
автосопровождения и выдачи в автопилот управляющих сигналов, пропорциональных
угловой скорости вращения линии
РАКЕТА–ЦЕЛЬ и углу пеленга.
Угол пеленга – угол между продольной осью ракеты и осью ГСН, в ЗУР 9М37 он может изменяться от 0 до 40° в любом направлении (рис. 1).
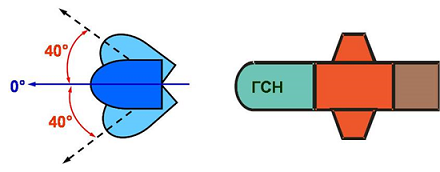
Рис. 1.
Понятие угла пеленга ГСН
Конструктивно
ГСН состоит из двух основных
узлов: гирокоординатора и
электронного блока.
Функционально
в состав ГСН входят (рис.
2):
- следящий координатор цели;
- система электронного
арретирования;
- система разгона и поддержки оборотов
гироскопа;
- система охлаждения фотоприемника инфракрасного
канала;
- координатный преобразователь.
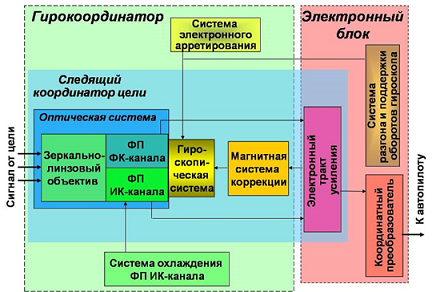
Рис. 2.
Функциональная схема ЗУР 9М37
Основные
технические характеристики ГСН:
- поле зрения - 1º;
- максимальные углы пеленга - 40°;
- время готовности к работе - 5 с;
- время непрерывной работы ГСН - 10 мин с последующим
перерывом на 30 мин.
2. Назначение и общее устройство основных элементов
оптической головки самонаведения
Следящий
координатор цели предназначен для
измерения угловой скорости вращения линии РАКЕТА-ЦЕЛЬ.
Состав
следящего координатора:
- оптическая система;
- гироскопическая система;
- электронный тракт усиления;
- магнитная система коррекции.
Оптическая
система предназначена для фокусирования
потока лучистой энергии от цели, его модуляции и преобразования в электрический
сигнал.
Оптическая система представляет собой зеркально-линзовый
объектив, рассчитанный для двух диапазонов длин волн. Состоит из системы
оптических устройств, модулирующих дисков и фотоприемников (рис.
3).
Оптическая система принимает энергию от цели, разделяет
ее на два канала: фотоконтрастный (ФК) и инфракрасный (ИК) и фокусирует на
модулирующих дисках (МД).
В ФК-канале используется модуляция светового потока вращающимся МД, а в ИК-канале - вращением изображения цели по неподвижному МД.
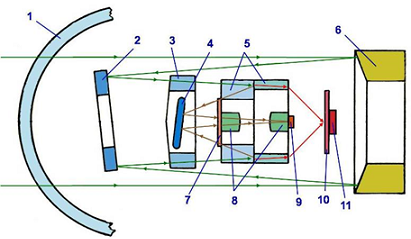
Рис. 3.
Оптическая система следящего координатора цели:
1 -
обтекатель; 2 - плоское контрзеркало; 3 - мениск-держатель; 4 - малое плоское
зеркало; 5 - интерференционные фильтры; 6 - асферическое приемное зеркало;
7 - модулирующий диск ФК-канала; 8 - конденсоры; 9 - фотоприемник
ФК-канала; 10 - модулирующий диск ИК-канала; 11 - фотосопротнвление ИК-канала
Эти диски модулируют поток лучистой энергии цели,
который поступает в фотоприемник. В нем поток энергии преобразуется в
электрический сигнал, параметры которого зависят от взаимного положения цели и
ракеты - величины и направления угла между осью ГСН и направлением на
цель.
В общем виде принцип модуляции сигнала от цели модулирующим диском показан на рис. 4. В этом примере в изменении частоты полученного электрического сигнала содержится информация об отклонении цели от оптической оси ГСН, то есть осуществляется частотная модуляция сигнала от цели.
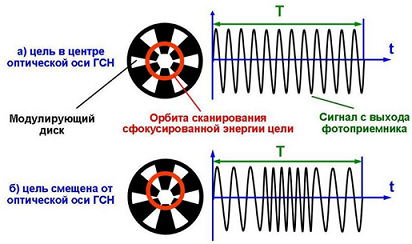
Рис. 4.
Принцип модуляции сигнала от цели
В оптической системе ГСН 9М37 применены более сложные модулирующие диски, которые обеспечивают: в ФК-канале – амплитудно-фазовую модуляцию (рис. 5), а в ИК-канале - частотно-фазовую модуляцию сигнала от цели (рис. 6).
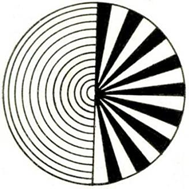
Рис. 5. Модулирующий диск ФК- канала
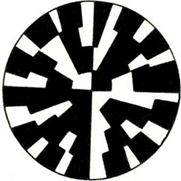
Рис. 6. Модулирующий диск
ИК- канала
Для повышения чувствительности ГСН, фотоприемник в
ИК-канале охлаждается микрохолодильником, работающем на сжатом азоте,
охлажденном до -200° С.
Гироскопическая система предназначена для создания системы отсчета,
относительно которой измеряются угловая скорость линии РАКЕТА–ЦЕЛЬ и угол
пеленга, необходимые для слежения ГСН за целью.
Основной элемент гироскопической системы - трехстепенной
гироскоп, на роторе которого собрана оптическая система ГСН. При этом оптическая
ось ГСН совпадает с осью вращения ротора гироскопа.
Электронный
тракт усиления предназначен для
усиления сигналов фотоприемников до величины, обеспечивающей работу магнитной
системы коррекции положения ротора гироскопа при слежении за
целью.
Магнитная
система коррекции обеспечивает
перемещение ротора гироскопа в направлении цели при ее
сопровождении.
Система
электрического арретирования
обеспечивает совмещение оптической оси ГСН (оси ротора гироскопа) с продольной
осью ракеты во время прицеливания.
Система
разгона и поддержки оборотов гироскопа
предназначена для быстрого разгона и поддержания номинальной частоты вращения
гироскопа.
Система
охлаждения фотоприемника ИК-канала
обеспечивает подачу жидкого азота в микрохолодильник ГСН в целях повышения
чувствительности ГСН.
Координатный
преобразователь предназначен для
преобразования сигналов от цели и выработки команд управления рулями ракеты.
3. Принцип действия оптической головки
самонаведения
Оператор наводит ракету на цель, и ГСН начинает
работу.
Поток лучистой энергии от цели принимается оптической
системой, спектрально разделяется фильтрами и фокусируется с помощью зеркал в
плоскостях модулирующих дисков ФК- и ИК-канала.
Фотоприемники каждого из каналов преобразуют падающий на
них модулированный поток лучистой энергии в электрические сигналы, поступающие в
усилительный тракт ГСН. Параметры сигнала, снимаемого с фотоприемника ФК-канала,
зависят от положения изображения цели на МД, а в ИК-канале - от положения орбиты
сканирования относительно края МД.
Управляющий сигнал в электронном тракте усиления
усиливается до необходимой величины. Нагрузкой усилительного тракта являются
магнитная система коррекции и
координатный преобразователь.
В магнитной системе коррекции управляющий сигнал
поступает на катушку коррекции. При прохождении по ней тока создается магнитное
поле, пропорциональное управляющему сигналу. Взаимодействие магнитных полей
вращающегося ротора гироскопа и катушки создает корректирующий момент,
заставляющий ротор перемещаться в направлении цели. Оптическая ось ГСН
перемещается в направлении линии визирования до тех пор, пока отметка от цели не
спроектируется в центр МД ФК-канала или орбита сканирования не займет положение
по краю МД в ИК-канале. В этом случае модуляции лучистой энергии не будет, и
управляющий сигнал станет равным нулю.
Таким образом, осуществляется автоматическое
сопровождение цели следящим координатором.
В координатном преобразователе управляющий сигнал
преобразовывается в управляющее напряжение, пропорциональное угловой скорости
линии РАКЕТА-ЦЕЛЬ и углу пеленга. Это напряжение поступает на вход автопилота
для выработки углов поворота рулей ракеты.
Кроме этого управляющее напряжение
поступает:
- в электрический привод ПУ для работы приводов
наведения при автоматическом слежении ПУ за целью,
- в аппаратуру оценки зоны для выработки углов
упреждения ПУ при старте ракеты;
- в аппаратуру запуска для управления положением
следящей марки в оптическом визире.

Тестовое задание
Системой взаимного наведения по методу перпендикулярного сближения.
Системой пассивного самонаведения по методу пропорционального сближения.
Системой прямого самонаведения по методу горизонтального сближения.
30°.
40°.
45°.
10 мин с последующим перерывом на 30 мин.
15 мин с последующим перерывом на 40 мин.
20 мин с последующим перерывом на 1 час.
Контроля и проверки ГСН.
Измерения угловой скорости вращения линии РАКЕТА-ЦЕЛЬ.
Все вышеперечисленные пункты.
Быстрого разгона и поддержания номинальной частоты вращения гироскопа.
Преобразования сферических координат цели в прямоугольные.
Преобразования сигналов от цели и выработки команд управления рулями ракеты.
Быстрого разгона и поддержания номинальной частоты вращения гироскопа.
Перемещения ротора гироскопа в направлении цели при ее сопровождении.
Совмещения оптической оси ГСН (оси ротора гироскопа) с продольной осью ракеты во время прицеливания.