6. Силовые приводы наведения ЗСУ-23-4
1. Назначение, состав и технические данные силовых
приводов
наведения
Силовые
электрогидравлические приводы наведения 2Э2 предназначены для наведения пушки АЗП-23 по азимуту β и
углу возвышения φ при работе в автоматическом режиме по данным РПК и в
полуавтоматическом режиме - от блока управления антенной
Т-55.
В состав
приводов наведения входят:
- привод горизонтального (ГН) и вертикального наведения
(ВН), каждый из которых состоит из:
- измерительного устройства;
- управляющего устройства;
- исполнительного устройства;
- стабилизирующего устройства;
- компенсирующего устройства;
- ограничитель углов (ОГ);
- ограничитель углов нижних (ОГН);
- аппаратура управления, коммутации и
контроля;
- пополнительный бак гидросистемы;
- блок питания приводов.
Технические
данные приводов
|
максимальная скорость: |
|
|
по
азимуту |
до
70°/с |
|
по углу возвышения |
до
60°/с |
|
статическая ошибка |
не более 0-02 |
|
переброска пушки: |
|
|
по азимуту на 28-00 |
не более
6 с |
|
по углу возвышения на 12-00 |
не более
3,5 с |
|
скорость наведения по наземным
целям: |
|
|
по азимуту |
20°/с |
|
по углу возвышения |
15°/с |
|
емкость гидросистемы силовых приводов
наведения |
40
литров |
2. Общее устройство и принцип работы электротехнических
и гидравлических устройств приводов наведения
Привод
горизонтального и вертикального наведения
Измерительное
устройство определяет углы
рассогласования между положением выходного валика орудийного преобразователя
координат (ОПК) и положением пушки АЗП-23 по горизонтали (Q – β) и вертикали (Ф
– φ), преобразует эти углы в электрический сигнал. Амплитуда и полярность
сигнала зависит от величины и знака разности углов рассогласования. Состоит из
вращающихся трансформаторов.
Управляющее
устройство предназначено для управления
работой исполнительного устройства. Оно состоит из усилителей мощности
горизонтального и вертикального наведения и управляющих элементов.
Усилители
мощности предназначены для суммирования
и преобразования сигналов рассогласования, стабилизации, компенсации,
поступающих на его вход, и их усиления.
Управляющие
элементы управляют работой
исполнительного устройства. В приводе ГН – это электродвигатель, а в приводе ВН
– электромагнит с установленной на его валике заслонкой.
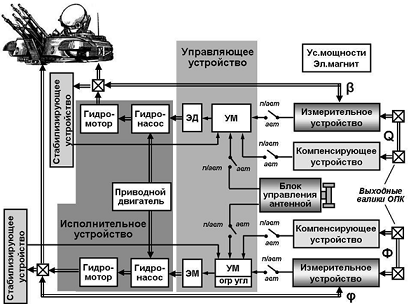
Рис. 1.
Функциональная схема системы гидроприводов
Исполнительное устройство предназначено для непосредственного наведения стволов
пушки АЗП-23 по азимуту и углу возвышения. Состоит из приводного
электродвигателя, гидронасосов и гидромоторов.
Приводной
электродвигатель предназначен для
вращения валов гидронасосов вертикального и горизонтального наведения и создания
в них давления рабочей жидкости.
Частота вращения - 4500 об/мин.
Гидронасосы
обеспечивают подачу рабочей жидкости в гидромотор с переменной, плавно
регулируемой величиной и изменяемым направлением потока в зависимости от
величины и полярности управляющего сигнала. Основным элементом управления
гидронасоса является люлька, при отклонении которой в ту или иную сторону
изменяется подача потока рабочей жидкости.
Гидромоторы
служат для преобразования энергии потока жидкости в механическую энергию
вращения вала гидромотора. Номинальное давление рабочей жидкости 100 кгс/см2,
максимальное - 180 кгс/см2.
Стабилизирующее устройство предназначено для обеспечения устойчивой работы
приводов наведения и уменьшения времени их успокоения при отработке
рассогласования.
Компенсирующее устройство предназначено для компенсации ошибок при наведении
пушки с постоянной и переменной скоростями.
Ограничитель
углов предназначен для включения и
выключения электрических цепей привода ВН при подходе пушки к предельным углам
возвышения или снижения. Он представляет собой электромеханический прибор
рычажного типа.
Ограничитель
углов нижний выключает электрическую
цепь привода ВН на более низких углах, чем ограничитель углов. Это увеличивает
зону наведения привода при стрельбе по наземным целям.
Аппаратура
управления, коммутации и контроля
предназначена для управления работой приводов наведения.
Пополнительный бак гидросистемы предназначен для заполнения рабочей жидкостью
гидравлических приборов и ее охлаждения.
В гидросистеме применяется гидравлическое масло МГЕ-10А,
емкость системы 40 литров. Уровень масла контролируется на пополнительном баке
через стекло по имеющимся рискам.
Блок
питания предназначен для обеспечения
приводов переменным напряжением 115 В 400 Гц и постоянным напряжением 110 В.
Размещение
элементов приводов
Все основные элементы приводов наведения размещены в
переднем отсеке башни. Аппаратура управления, коммутации и контроля находится в
пульте командира ЗСУ и блоке управления антенной Т-55. Блок усилителей мощности
Т-39 размещен в боевом отсеке в шкафу Т-42 за спиной командира
ЗСУ.
3. Работа приводов наведения в различных
режимах
Приводы
наведения работают в двух режимах:
- автоматическом;
- полуавтоматическом.
В
автоматическом режиме приводы наведения
управляются радиолокационно-приборным комплексом РПК-2, обеспечивающим
автоматическое сопровождение цели.
Из
измерительного устройства (рис. 1)
электрические сигналы, пропорциональные углам рассогласования между положением
выходного валика орудийного преобразователя координат (ОПК) и пушки АЗП-23 по
горизонтали (Q – β) и вертикали (Ф – φ) поступают на усилители мощности.
Усилители
мощности суммируют и преобразовывают
сигналы рассогласования, стабилизации, компенсации, усиливают их и подают
на управляющие элементы приводов
наведения – электродвигатель в приводе ГН и электромагнит в приводе
ВН.
При подаче питания на приводной двигатель, он начинает
вращать валы гидронасосов (рис. 2),
тем самым нагнетая рабочую жидкость в гидромотор. В гидромоторе энергия потока жидкости
преобразуется во вращение его вала. Частота вращения вала зависит от подачи
насоса и может быть изменена от нулевого до наибольшего значения. Направление
вращения вала также изменяется в зависимости от подачи потока жидкости. Если
сигнал рассогласования отсутствует, то выходной вал гидромоторов вращаться не
будет (рис. 3).
При появлении сигнала рассогласования, управляющий
электродвигатель ГН или управляющий электромагнит ВН вырабатывают управляющее
воздействие. В результате этого люлька гидронасоса поворачивается, увеличивая
поток жидкости в одном из трубопроводов. Вал гидромотора начинает вращаться и
поворачивать башню ЗСУ или пушку в ту или другую сторону.
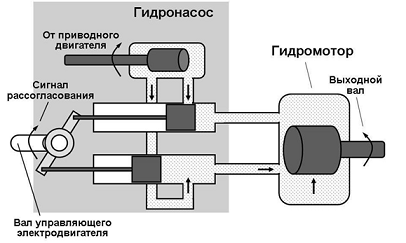
Рис. 2.
Работа элементов исполнительного устройства
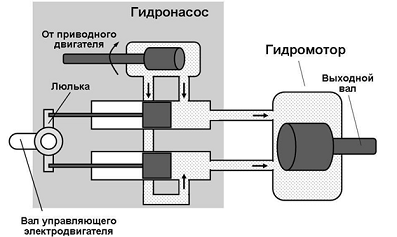
Рис. 3.
Исходное положение элементов исполнительного устройства
Вращение будет продолжаться до тех пор, пока
измерительное устройство будет выдавать сигнал рассогласования. Таки образом
будет осуществляться постоянное наведение пушки по данным
РПК.
В
полуавтоматическом режиме управление
приводами осуществляется по сигналам, снимаемым с блока управления антенной Т-55
(рис. 4). Направление вращения пушки зависит от направления поворота рукояток
блока, а скорость наведения пропорциональна углу поворота рукояток управления.
При работе приводов в режиме полуавтоматического наведения скорости их наведения
снижаются для удобства работы оператора и уменьшения ошибок наводки на
цель.

Рис. 4.
Блок управления антенной Т-55
Для обеспечения безопасности работы и правильной
эксплуатации приводов наведения в цепь пуска приводного электродвигателя
включены блокировки:
- люка механика-водителя;
- стопора башни;
- стопора качающейся части
по-походному;
- дверцы звеньесборника.
Органы управления и контроля приводов наведения
расположены на пульте командира (рис. 5)

Рис. 5. Органы управления и контроля гидроприводов на пульте командира

Тестовое задание
для автоматического наведения визирного устройства по угловым координатам
для автоматического наведения следящего координатора цели по угловым координатам
для автоматического наведения пушки по азимуту и углу возвышения
25 литров
30 литров
40 литров
30°/с
20°/с
40°/с