13. Счетно-решающий прибор РПК-2
1. Назначение, состав, устройство и технические
характеристики СРП. Размещение
СРП
Счетно-решающий прибор (СРП) 1А7 предназначен для решения задачи встречи снаряда с целью
и выработки углов наведения АЗП-23 для стрельбы.
В основу решения задачи встречи заложена гипотеза о том,
что цель в течение упредительного времени, т.е. времени полета снаряда в
упрежденную точку, движется прямолинейно и равномерно в любой плоскости (рис.
1).
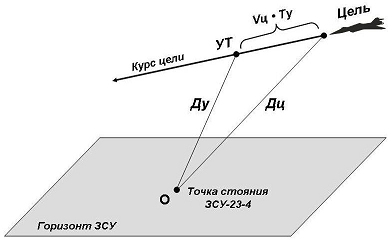
Рис. 1.
Решение задачи встречи снаряда с целью
Входными
данными СРП являются координаты цели Д,
ε, β, поступающие от РЛС, а выходными – упрежденный азимут βу и
угол возвышения φ (углы наведения АЗП-23).
В СРП предусмотрены два режима
работы:
- первый (основной) режим - входные координаты поступают
от РЛС;
- второй режим (режим ЗУ) - входные координаты
определяются по запомненным в СРП координатам и параметрам движения цели.
В состав
СРП входят (рис.
2):
- преобразователь координат, элементы которого размещены
в блоке механизма дальности Т-22 и в антенной колонке Т-2;
- три координатных блока Х, Y и Н;
- три скоростных блока Vх, Vу и
Vн;
- три решающих блока Ту, φ, βу и
К1;
- блок проверок (БП).
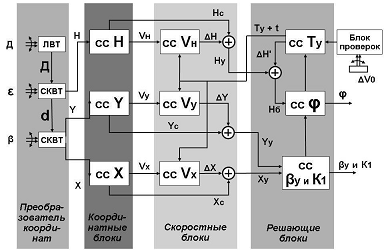
Рис. 2.
Функциональная схема счетно-решающего прибора 1А7
Технические
характеристики СРП:
|
пределы работы: |
|
|
по текущим координатам Х и У |
от -100 до + |
|
по высоте цели Н
|
от -9000 до +9000м |
|
по азимуту текущему β и упрежденному βу |
неограниченно |
|
по углу возвышения φ |
от -0-85 до +14-50 |
|
по упрежденному времени Ту |
от 0,2 до 5,5 с |
|
по скорости цели Vц |
от 0 до 450 м/сек |
|
в СРП предусмотрен: |
|
|
учет поправки на суммарное отклонение начальной скорости снаряда от табличной ΔVо сум |
от -10 до +6 % (на блоке
проверки) |
|
ввод корректуры в упрежденный азимут βу и угол возвышения φ |
от -0-50 до +0-50 (на блоках φ, βу и
К1) |
|
электропитание СРП: |
|
|
переменные напряжения |
115 и 220В 400 Гц |
|
напряжение постоянного тока |
27,5В |
|
Время непрерывной работы |
до 8
часов |
СРП
размещается в башне напротив сиденья
командира ЗСУ.
Для решения задачи встречи в СРП используются электрические счетно-решающие устройства
аналогового типа:
- вращающиеся трансформаторы:
- синусно-косинусные (СКВТ);
- линейные (ЛВТ);
- масштабные (МВТ).
- тахогенераторы;
- следящие системы.
Синусно-косинусные вращающиеся трансформаторы (СКВТ)
используются для одновременного
получения величины синуса и косинуса угла поворота ротора, умножения какой-либо
величины на синус и косинус, а также для вычисления некоторых функциональных
зависимостей, например, времени полета снаряда от дальности стрельбы и т. п.
(рис. 3 и 4).
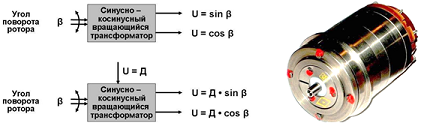
Рис. 3.
Принцип работы синусно – косинусного вращающегося трансформатора
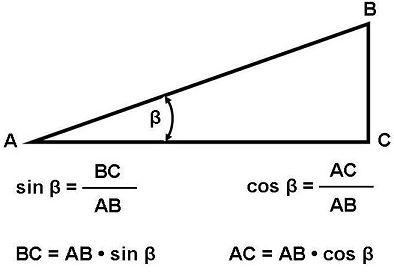
Рис. 4.
Понятие синуса и косинуса
У линейных вращающихся трансформаторов (ЛВТ) выходное напряжение пропорционально углу поворота ротора (рис. 5).
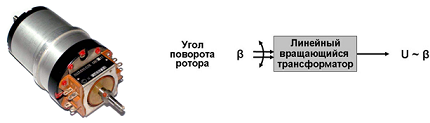
Рис. 5.
Принцип работы линейного вращающегося
трансформатора
Масштабные
вращающиеся трансформаторы (МВТ)
используются для регулировки переменных напряжений. Степень изменения величины
напряжения регулируется поворотом
ротора (рис. 6).
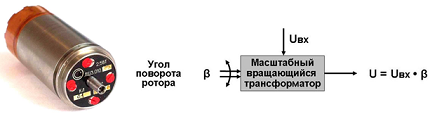
Рис. 6.
Принцип работы масштабного вращающегося
трансформатора
Тахогенераторы (ТГ) работают в режиме генератора и
используются для выработки напряжения, пропорционального скорости вращения его
ротора (рис. 7).

Рис. 7. Принцип работы
тахогенератора
В СРП применяются следящие системы (СС)
электромеханического типа. У них входная величина задается в виде электрического
напряжения переменного тока, а выходная величина отрабатывается в виде угла
поворота вала (рис. 8).
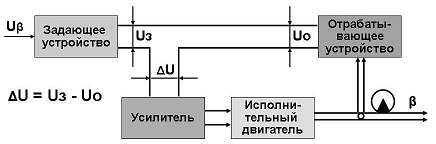
Рис. 8.
Следящая система, применяемая в СРП 1А7
В состав СС входят задающее устройство, усилитель,
исполнительный двигатель и
отрабатывающее устройство. Сущность работы СС заключается в том, что двигатель
должен отработать угол β, пропорциональный напряжению Uз, поступающему с
задающего устройства.
При работе СС напряжение отрабатывающего устройства Uо
вычитается из задающего напряжения Uз и образуется управляющий сигнал ΔU = Uз –
Uо. Этот сигнал ΔU поступает в усилитель и далее - на исполнительный двигатель.
Двигатель начинает вращаться и воздействует на
отрабатывающее устройство, изменяя величину Uо. Когда напряжение Uо станет
равным Uз, управляющий сигнал ΔU станет равным нулю, двигатель остановится,
отработав угол β, пропорциональный заданному напряжению
Uз.
В качестве задающих и отрабатывающих устройств в СС
используют вращающиеся трансформаторы.
При помощи вышерассмотренных счетно-решающих устройств в СРП осуществляется вычисление всех величин и параметров в соответствии с определенными математическими формулами и зависимостями.
Конструкция
прибора. Все блоки СРП размещены в
трехъярусном металлическом шкафу, который закреплен в башне ЗСУ на амортизаторах
(рис. 9 и 10).

Рис. 9. Счетно-решающий прибор
1А7
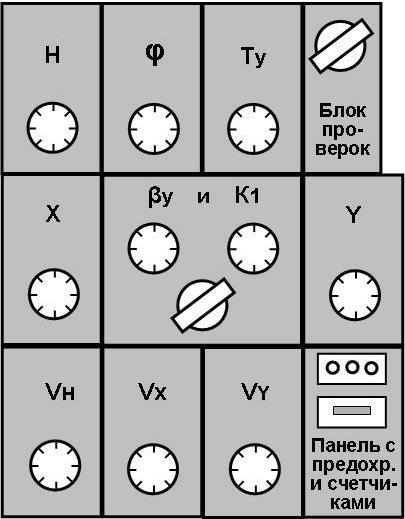
Рис. 10. Схема блоков СРП
Подача воздуха для охлаждения производится через
отверстие в дне шкафа, отвод горячего воздуха - через брезентовый рукав на
задней крышке. Электрические соединения осуществляются через разъемы, собранные
в жгуты, прикрепленные к раме в задней части.
2. Принцип работы
СРП
Решение
задачи встречи в СРП выполняется в 6 этапов:
1) преобразование текущих сферических координат цели Д,
β и ε в прямоугольные Х, Y, Н;
2) сглаживание прямоугольных координат Х, Y, Н и
определение параметров движения цели Vх, Vу, Vн;
3) определение упреждений ΔХ, ΔY, ΔН;
4) определение упрежденных координат Ху, Yу, Ну и
Нб;.
5) учет поправок на суммарное отклонение начальной
скорости снаряда от табличной ΔVо сум.;
6) преобразование упрежденных координат Ху, Yу, Ну в
упрежденные сферические координаты - упрежденный азимут βу и угол возвышения
φ.
На первом
этапе преобразование сферических
координат Д, β и ε в прямоугольные Х, Y, Н происходит в преобразователе (рис.
16.11 и 16.12).
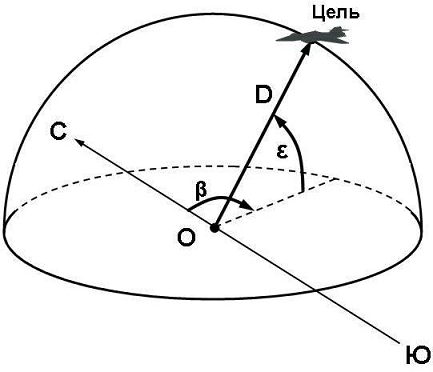
Рис. 11. Сферическая система
координат
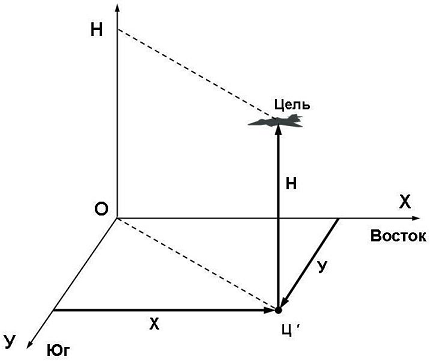
Рис. 12. Прямоугольная система
координат
Дальность цели Д в виде поворота ротора поступает на
ЛВТ, с выхода которого снимается напряжение, пропорциональное дальности Д, и
подается на СКВТ. Ротор СКВТ поворачивается на угол места ε, в результате чего с
выхода синусной обмотки снимается напряжение, пропорциональное высоте цели Н, а
с выхода косинусной обмотки – напряжение горизонтальной дальности цели d (рис.
13).
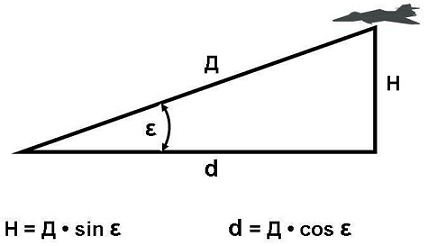
Рис. 13. Расчет высоты и
горизонтальной дальности цели
Напряжение d поступает на другой СКВТ, ротор которого
поворачивается на угол азимута цели β. С его обмоток снимается напряжение
прямоугольных координат: с синусной - Х , с косинусной – Y (рис. 14).
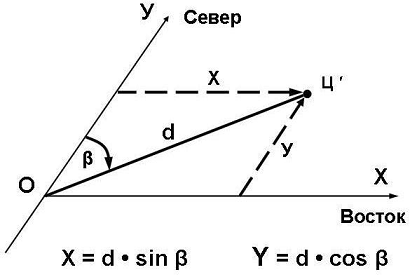
Рис. 14. .Расчет координат Х и Y
На втором
этапе напряжения, пропорциональные
координатам Х, Y, Н, из преобразователя поступают в соответствующие координатные
блоки Х, Y, Н. В этих блоках происходит сглаживание координат (выработка Хс, Yс,
Нс) и определение параметров
движения цели Vх, Vу, Vн.
Сглаживание
координат – компенсация случайных
ошибок в определении координат, осуществляется за время t = 0,5 сек.
Параметры
движения цели – скорость изменения
координат Х, Y, Н, т.е. скорость цели в той или иной плоскости Vх, Vу, Vн. Эти
скорости определяются с помощью тахогенераторов.
На третьем
этапе в скоростных блоках Vх, Vу, Vн
вырабатываются упреждения координат ΔХ, ΔY, ΔН по формуле:
ΔХ = Vх • (Ту +
t),
где Ту – полетное время (время полета снаряда до
упрежденной точки);
t – время
компенсации отставания при сглаживании координат (0,5 сек).
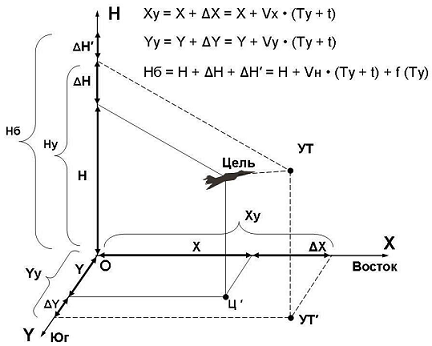
Рис. 15.
Принцип расчета упрежденных координат
На четвертом
этапе определяются упрежденные
координаты Ху, Yу, Ну (координаты упрежденной точки УТ) по
формуле:
Ху = Хс + ΔХ.
Аналогично определяются и координаты Yу и
Ну.
Если точно навести пушку в упрежденную точку и
выстрелить, то снаряд пройдет ниже УТ. Это снижение зависит от веса снаряда и
расстояния до упрежденной точки, т. е. времени полета снаряда до упрежденной
точки Ту. Для того, чтобы снаряд попал точно в УТ, надо наводить пушку выше УТ
на величину баллистического превышения ΔН′.
Так как вес снаряда постоянен, то превышение зависит
только от полетного времени Ту и будет равно
ΔН′ = f (Ту).
Это превышение вырабатывается в решающем блоке Ту, затем
оно суммируется с Ну и вырабатывается баллистическая высота
Нб:
Нб = Ну + ΔН′
На пятом
этапе в СРП вводится поправка на
суммарное отклонение начальной скорости снаряда от табличной ΔVо по причине
износа каналов стволов, отклонения температуры зарядов и плотности воздуха от
табличных значений (t = +15°С и По = 1,206 кг/м3).
На шестом
этапе в решающих блоках φ и βу и К1
упрежденные прямоугольные координаты Ху, Yу, Нб преобразуются в сферические
координаты - упрежденный азимут βу и
угол возвышения φ, которые поступают в систему
стабилизации.
Решающий блок βу и К1 помимо выработки βу осуществляет
отработку и угла курса установки К, данные о котором поступают от
гироазимутгоризонта системы стабилизации. (Угол курса К - угол в горизонтальной
плоскости от направления на север до продольной оси ЗСУ). Следящая система К1
участия в решении задачи встречи не принимает, просто конструктивно находится в
СРП.
3. Работа СРП в различных
режимах
В СРП предусмотрены два режима
работы.
В первом (основном) режиме входные координаты Д, β и ε
поступают от РЛС. Этот режим уже рассмотрен.
Второй режим - режим ЗУ (запомненные
установки).
В этом
режиме РЛС отключается от СРП и углы наведения βу и φ вырабатываются в СРП по «запомненным»
значениям текущих координат (Х, Y, Н) и скорости цели (Vх, Vу, Vн), исходя из
гипотезы о равномерном и прямолинейном ее движении в любой
плоскости.
Перед включением режима ЗУ необходимо, чтобы СРП
проработал в первом режиме не менее 5 секунд для получения текущих координат
цели. Время работы в режиме ЗУ ограничено 8-10 сек. После этого ошибки в
определении координат упрежденной точки становятся большими и эффективность
стрельбы будет низкой.
Режим ЗУ применяется при угрозе потери цели радиолокатором при появлении помех, при больших угловых скоростях движения цели или при возникновении неисправностей.

Тестовое задание
азимут воздушной цели, угол места и дальность до цели
азимут воздушной цели, высота и курс цели
азимут воздушной цели, курсовой параметр и высота цели
для решения задачи встречи снаряда с целью
для обеспечения работы РПК-2 в условиях помех
для определения координат воздушной цели
пульта командира ЗСУ-23-4
соседней ЗСУ-23-4
визирного устройства
следящие системы, дифференцирующие сглаживающие устройства, электромеханические реле времени
фазовращатель, смеситель сигнала, амплитудно-фазовый детектор
вращающиеся трансформаторы, тахогенераторы, следящие системы