11. Системы управления антенной и поиска РЛС 1РЛ33
1. Назначение, состав, устройство и
характеристики системы поиска
Система
поиска предназначена для наблюдения за
воздушной обстановкой, грубого определения дальности до цели и наведения антенны
на цель по азимуту и углу места для перехода на автоматическое
сопровождение.
В состав
системы поиска входят: - блок индикатора поиска (ИП) Т-28 (рис. 2), размещен в
шкафу Т-36 перед оператором поиска-наводчиком; - блок азимутальной развертки Т-53 (рис. 1), находится в
шкафу Т-36; - азимутальный и угломестный датчики, расположенные в
антенной колонке Т-2.
Рис. 1.
Блок азимутальной развертки Т-53
Рис. 2.
Блок индикатора поиска Т-28
Устройство и
размещение элементов системы поиска
В ИП используется электронно - лучевая трубка (ЭЛТ) с
радиально-круговой разверткой и электромагнитным отклонением
луча.
На экране ИП
наблюдаются
(рис.3):
- яркостные отметки от целей и местных
предметов;
- прямоугольный растр, большая сторона которого
представляет собой развертку по дальности, а меньшая – развертку по углу места,
соответствующую сектору качания луча антенны по вертикали;
- визирная линия в центре растра, положение которой
согласовано с электрической осью антенны;
- масштабные метки дальности для грубого определения
дальности до цели;
- стробные метки дальности, «привязанные» к визиру на
развертке грубой дальности индикатора дальности, и перемещаемые штурвалом
дальности;
- отметки опознавания воздушных
объектов.
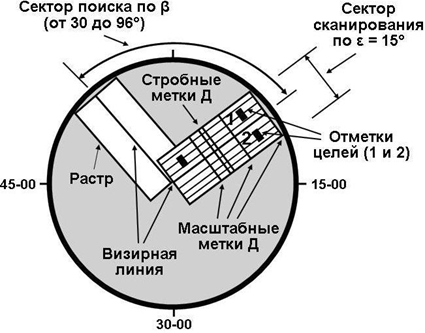
Рис. 3.
Информация, высвечивающаяся на индикаторе поиска
Для выработки и отображения на ИП вышеперечисленной
информации в состав системы поиска
функционально входят (рис. 4):
- канал формирования управляющих
напряжений;
- канал формирования радиально-круговой развертки
дальности;
- канал формирования развертки по углу
места;
- канал формирования импульсов
подсвета;
- канал формирования импульсов
визира;
- канал видеоусилителя-ограничителя и
смесителя;
- канал формирования стробных и масштабных меток
дальности.
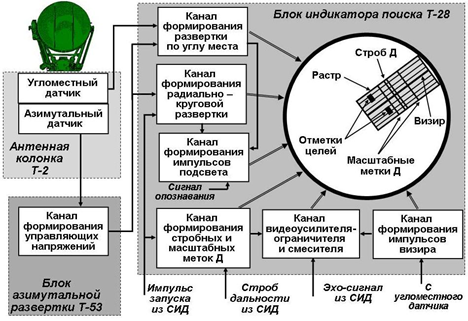
Рис. 4.
Функциональная схема системы поиска
2. Работа
системы поиска
Синхронизирующий импульс запуска из СИД, сигналы
азимутального датчика и канала
формирования управляющих напряжений поступают в канал формирования
радиально-круговой развертки. Этот канал создает на экране ИП развертку, синхронно вращающуюся с
антенной по азимуту. Длина развертки может быть 15 или
Информация о положении электрической оси антенны по углу
места с угломестного датчика и сигналы канала формирования управляющих
напряжений поступают в канал формирования развертки по углу места. Он формирует
на ИП прямоугольный растр, большая
сторона которого представляет развертку по дальности, а меньшая соответствует
сектору сканирования (качания) луча антенны по углу места, равному 15°.
Развертка по углу места производится по часовой стрелке синхронно с качанием
луча сверху вниз. Отклонение цели от визира характеризует ее положение в
пределах сектора качания луча антенны по углу места. На рис. 1 цели 1 и 2 имеют
одинаковую дальность и азимут, но высота цели 1 больше, чем высота цели 2.
В канал формирования стробных и масштабных меток
дальности поступают из СИД синхронизирующий импульс запуска и подвижный строб
дальности, положение которого соответствует положению визира на развертке грубой
дальности и может изменяться вращением штурвала дальности. Этот канал формирует
на ИП масштабные метки дальности (5,
10,
Канал формирования импульсов визира вырабатывает сигнал,
соответствующий положению оси антенны по углу места, который высвечивается на ИП
в виде визирной линии (визира).
Канал видеусилителя-ограничителя и смесителя усиливает и
ограничивает по амплитуде эхо-сигналы воздушных целей, суммирует (смешивает) с
ними сигналы масштабных, стробных меток и визира и выдает обобщенный сигнал,
промодулированный по яркости, на ИП.
В канале формирования импульсов подсвета происходит
смешивание импульсов радиально-круговой развертки, развертки по углу места и
сигналов опознавания воздушной цели и обеспечивается их видимость (подсвет) на
ИП.
Таким образом, при боевой работе на ИП высвечивается
прямоугольный растр, соответствующий сектору сканирования луча антенны по углу
места 15°. Этот растр или вращается вкруговую (режим кругового поиска) или
качается в секторе от 30° до 96° по азимуту. В режиме ускоренного кругового
поиска на экране ИП вместо растра высвечивается радиальная линия (рис. 5).
В середине растра высвечивается визирная линия,
положение которой соответствует электрической оси антенны. По положению визирной
линии определяется азимут, под которым направлен луч антенны. Отсчитывается
азимут по шкале, имеющейся в обрамлении экрана ИП.
Сигнал от цели высвечивается в виде яркостной отметки
(дужки), расстояние до которой от центра экрана является дальностью до цели, которую определяют
по масштабным меткам дальности. Кроме этого на ИП высвечиваются стробные метки
дальности, необходимые для перехода на автоматическое сопровождение выбранной
цели.
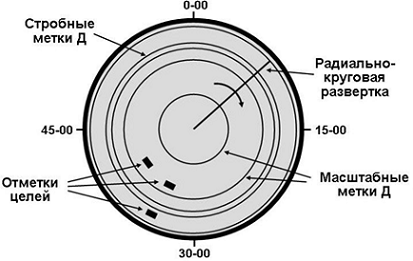
Рис. 5.
Вид индикатора поиска в режиме ускоренного кругового
поиска
Органы управления, регулировки и настройки системы
поиска находятся на передней панели блока Т-28.
3. Назначение, состав, устройство и характеристики
СУА
Система управления антенной (СУА) предназначена для
управления положением антенны по азимуту и углу места при поиске и
автосопровождении цели.
В состав СУА входят (рис. 6):
- канал сопровождения по азимуту;
- канал сопровождения по углу
места;
- устройство выделения сигнала
ошибки;
- блок управления антенной Т-55;
- приводные двигатели по азимуту и углу места;
- электромагнитные порошковые муфты (ЭМПМ) по азимуту и
углу места.
Основные характеристики СУА:
|
пределы перемещения антенны по
азимуту |
неограниченно
вкруговую |
|
пределы перемещения антенны по углу места
|
от – 9° до + 87° |
|
скорость движения антенны по
азимуту: |
|
|
в режиме кругового и секторного поисков
|
20°/c |
|
в режиме ускоренного кругового поиска
|
до 60°/с |
|
величина секторного поиска по азимуту |
от 5-00 (30°) до 16-00
(96°) |
|
величина секторного поиска по углу места
|
15° |
|
точность определения угловых координат цели
|
0-06
(21,6') |
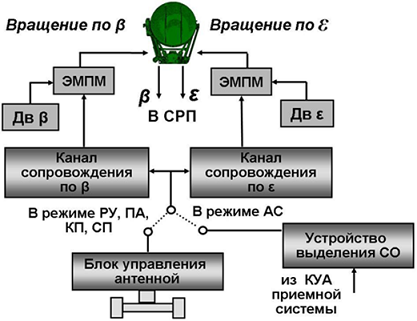
Рис. 6.
Функциональная схема системы управления антенной
Устройство и размещение элементов
СУА
В состав СУА входят:
- блок сопровождения по угловым координатам Т-13
(размещен в шкафу Т-40) - справа от оператора дальности (рис.
7);
- блок управления антенной Т-55 (размещен под шкафом
Т-36) - перед оператором поиска-наводчиком (рис. 8);

Рис. 7.
Блок сопровождения по угловым координатам Т-13
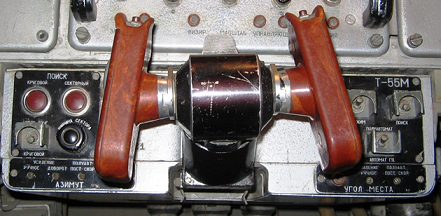
Рис. 8.
Блок управления антенной Т-55
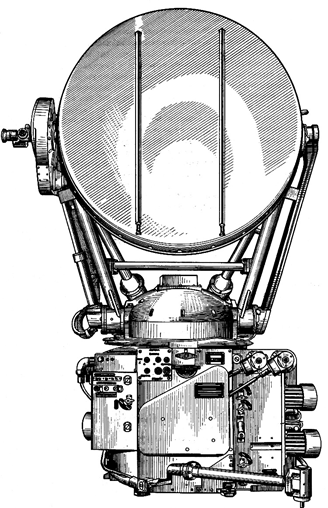
Рис. 9.
Антенная колонка Т-2
4. Работа СУА
Система управления антенной работает в следующих
режимах:
- ручного управления;
- полуавтоматического управления;
- автоматического сопровождения
цели;
- поиска (кругового, секторного).
В режиме
ручного управления управление антенной
по азимуту и углу места осуществляется оператором поиска с помощью рукояток
блока управления антенной Т-55 (рис. 8).
При повороте рукояток вправо или влево в блоке
управления антенной вырабатывается сигнал ошибки, который в канале сопровождения
по азимуту усиливается и преобразуется в управляющее напряжение. Вращение
антенны по азимуту производится с помощью электромагнитных порошковых муфт,
которые при подаче на них управляющего напряжения передают вращение от
приводного двигателя. ЭМП муфта передает вращение только в одну сторону, поэтому
для вращения антенны в обе стороны используются две муфты.
Аналогично осуществляется управление движением антенны
по углу места.
Режим
полуавтоматического управления
аналогичен ручному управлению, только скорость движения антенны зависит от угла
поворота рукояток блока управления антенной Т-55.
В режиме
автоматического сопровождения (рис. 4)
сигнал ошибки из канала угловой автоматики приемной системы поступает в
устройство выделения сигнала ошибки. В этом устройстве выделяется сигнал ошибки,
который является общим для азимута и угла места.
В каналах сопровождения по азимуту и углу места
выделяются азимутальная и угломестная составляющие сигнала ошибки, которые
преобразовываются в управляющие напряжения по азимуту и углу места. Эти
напряжения поступают на соответствующие ЭМПМ, которые вращают антенну в сторону
цели. Вращение антенны происходит до тех пор, пока ось антенны не совпадет с
направлением на цель и сигнал ошибки станет равным нулю. При движении цели
антенна будет непрерывно следить за ней.
С осей вращения антенны считывается информация об азимуте и угле места цели, которая поступает в СРП.
Также синхронно с осями антенны вращается и левая головка визирного устройства,
которая обеспечивает работу ЗСУ во втором режиме.
В режиме
кругового и секторного поиска антенна с
постоянной скоростью перемещается по азимуту вкруговую или в установленном
секторе 30-96°.
Кроме того, в режиме поиска поисковый облучатель антенны
обеспечивает сканирование (быстрое перемещение) луча антенны по углу места в
секторе 15°.
Положение секторов поиска по азимуту и углу места устанавливается с помощью рукояток управления блока управления антенной.

Тестовое задание
отметки от целей и местных предметов, развертка курса цели, прямоугольный импульс
отметки от целей и местных предметов, развертка грубой дальности, дырочный визир
отметки от целей и местных предметов, синусоидальная развертка, развертка точной дальности
20 °/сек
60 °/сек
45 °/сек
для отворота антенны РЛС в безопасный сектор при применении противником активных помех
для управления положением антенны радиостанции Р-123 при организации радиосвязи
для управления положением антенны РЛС по азимуту и углу места
визирной линии
масштабных меток
отметок от целей