
Page 8 - Система управления огнем БМП-2
P. 8
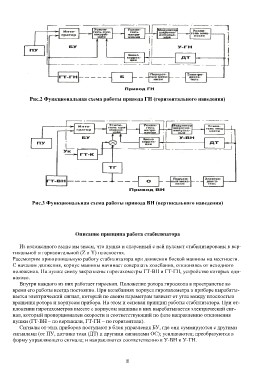
Рис.2 Функциональная схема работы привода ГН (горизонтального наведения)
Рис.3 Функциональная схема работы привода ВН (вертикального наведения)
Описание принципа работа стабилизатора
Из изложенного выше мы знаем, что пушка и спаренный с ней пулемет стабилизированы в вер-
тикальной и горизонтальной (Z и Y) плоскостях.
Рассмотрим принципиальную работу стабилизатора при движении боевой машины на местности.
С началом движения, корпус машины начинает совершать колебания, отклоняясь от исходного
положения. На пушке снизу закреплены гиротахометры ГТ-ВН и ГТ-ГН, устройство которых оди-
наково.
Внутри каждого из них работает гироскоп. Положение ротора гироскопа в пространстве во
время его работы всегда постоянно. При колебаниях корпуса гиротахометра в приборе вырабаты-
вается электрический сигнал, который по своим параметрам зависит от угла между плоскостью
вращения ротора и корпусом прибора. На этом и основан принцип работы стабилизатора. При от-
клонении гиротахометров вместе с корпусом машины в них вырабатывается электрический сиг-
нал, который пропорционален скорости и соответствующий по фазе направлению отклонения
пушки (ГТ-ВН – по вертикали, ГТ-ГН – по горизонтали).
Сигналы от этих приборов поступают в блок управления БУ, где они суммируются с другими
сигналами (от ПУ, датчика тока (ДТ) и другими сигналами ОС); усиливаются; преобразуются в
форму управляющего сигнала; и направляются соответственно в У-ВН и У-ГН.
8