


Ученые КазНУ придумали систему движения робота-гуманоида
Просмотров: 3481
Группа ученых КазНУ имени аль-Фараби под руководством А.К. Ералиева, руководителя научно-исследовательского института механики и математики, кандидата технических наук, придумали систему движения свободно проходящий сложные места робота-гуманоида. Об этом сообщает Национальный центр государственной научно-технической экспертизы.
Взяв научный проект ученые КазНУ стремились управляя движения робота изобрести новую систему проходящие трудные места. Специалисты в системе управления движениями робота-гуманоида использовали пассивный метод динамики. Обеспечивающие движения в экологических ситуациях робота применили местные реактивные навигации.
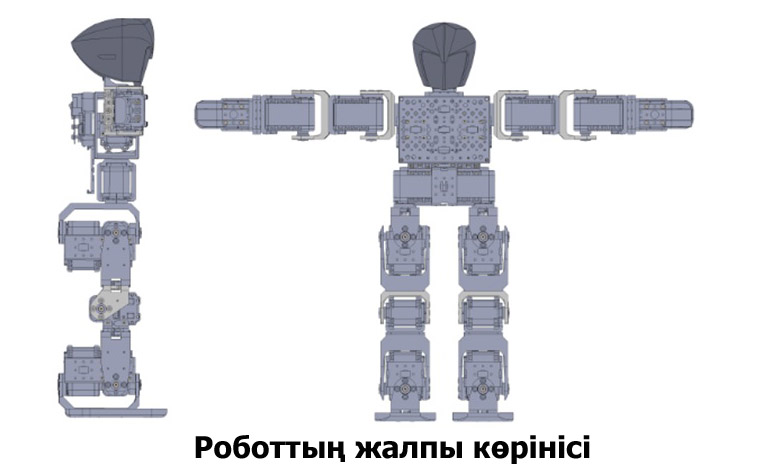
Ученые КазНУ изобрели робота гуманоида со способностью двигаться по неровной поверхности и экономить энергию. Во время научно-исследовательской работы ученые соединили верхнюю и нижнюю часть робота, а также решили задачу, которая контролирует центр тяжести. «Движение на конечностях», «нижний старт» дают возможность роботу делать разные движения.
Надо отметить, что все звенья и все участки тела робота описаны на 242 матрицах. Изготовленный учеными КазНУ им. аль-Фараби гуманоид-робот может двигаться не только по извилистым путям, но и хорошо экономить свою энергию во время передвижения через обозначенные алгоритмы.

