


Ученые КазНУ разработали новые алгоритмы в робототехнике
Просмотров: 3012
Алгоритмы для оптимизации задач в интеллектуальных системах автоматического контроля, описываемые обыкновенными дифференциальными уравнениями или разностными уравнениями, разработали ученые НИИ математики и механики КазНУ им.аль-Фараби. Руководитель проекта - д.т.н., профессор З.Н. Мурзабеков.
Авторами проекта найдены оптимальные управления с обратной связью для рассматриваемых классов систем с закрепленными концами или свободными правыми концами траекторий. Новизна предлагаемого подхода заключается в использовании множителей Лагранжа специального вида, что позволяет построить синтезирующие управления, удовлетворяющие заданным ограничениям.
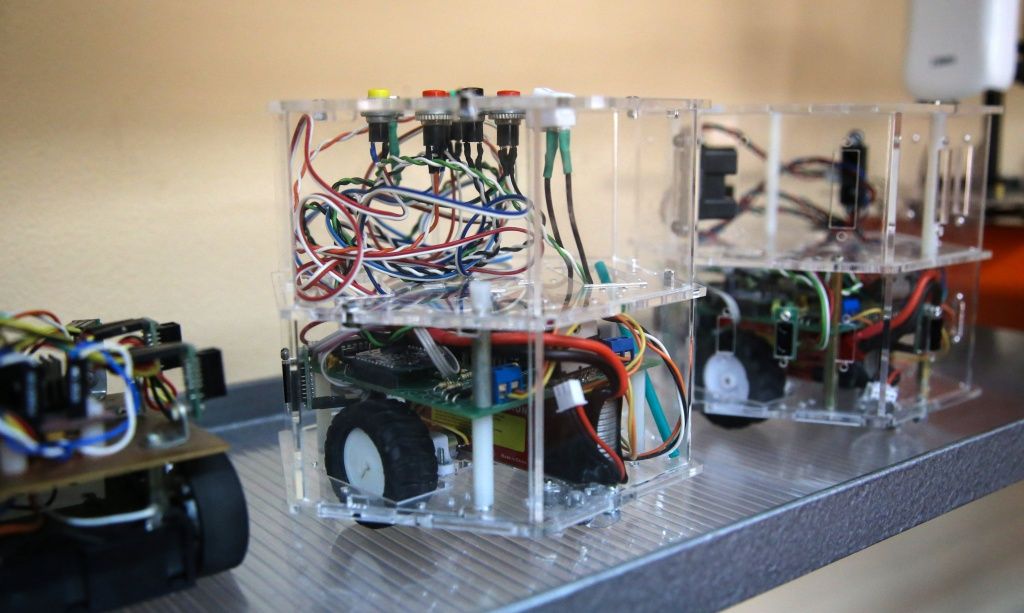
Результаты работы имеют широкий спектр применения, могут быть использованы для построения оптимальных синтезирующих управлений при проектировании технических систем, в частности, мобильных роботов. Применимы для систем проектирования и управления в конструкторских бюро, проектных организациях, ВУЗах и НИИ, которые занимаются вопросами оптимального управления, динамическими системами, в частности, летательными аппаратами, робототехническими устройствами и др.
НЦГНТЭ