5. Система стабилизации ЗСУ-23-4
1. Устройство, назначение, состав и технические данные
системы стабилизации
Система
стабилизации ЗСУ-23-4 предназначена для
сохранения неизменным направления антенны и стволов пушки при движении
ЗСУ-23-4.
Наличие системы стабилизации дает возможность вести
стрельбу при движении ЗСУ-23-4 со скоростью до 40 км/час и углах наклона до 10°
, а также с места без горизонтирования установки.
Система
стабилизации включает (рис.
1):
- стабилизацию линии визирования (направления
антенны);
- стабилизацию линии выстрела (направления
стволов).
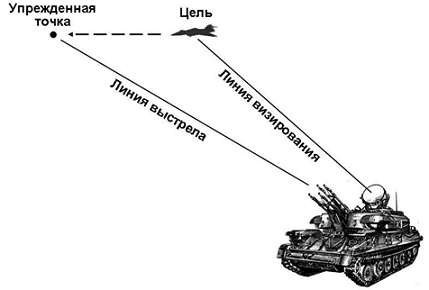
Рис. 1. Линии визирования и
выстрела
Состав
системы стабилизации (рис.
2):
- гироазимутгоризонт (ГАГ) – размещен под сиденьем
старшего оператора - наводчика;
- визирный преобразователь координат (ВПК) – под
сиденьем оператора дальности;
- орудийный преобразователь координат (ОПК) – под
сиденьем командира установки;
- следящие приводы стабилизации (СПС) – размещены в
антенной колонке:
- СПС - Δq;
- СПС - Δε;
- следящая система К – размещена в
СРП.
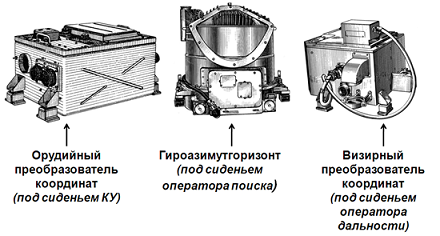
Рис. 2. Основные приборы системы
стабилизации
Углы в
горизонтальной плоскости (рис.
3)
Азимут цели b - угол в горизонтальной плоскости между направлением на
север и направлением на цель, отсчитываемый по ходу часовой
стрелки.
Азимут упрежденной точки bу - угол в горизонтальной плоскости между направлением
на север и направлением на УТ, отсчитываемый по ходу часовой
стрелки.
Угол курса К - угол в горизонтальной плоскости от
направления на север до продольной оси ЗСУ. Угол положителен при отклонении оси
установки по ходу часовой стрелки от направления на север.
Угол q – угол в горизонтальной плоскости между осью
установки и направлением на цель (линией визирования).
Угол qу – угол в горизонтальной плоскости между осью
установки и направлением на УТ (линией выстрела).
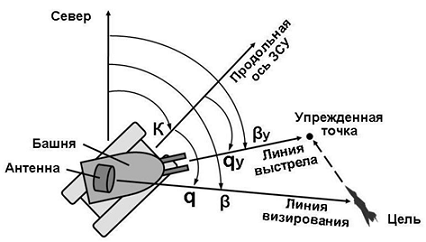
Рис. 3. Углы в горизонтальной
плоскости
Углы в
вертикальной плоскости (рис.
4)
Угол места
цели e - угол между направлением на цель и горизонтальной
плоскостью.
Угол места
упрежденной точки φ - угол между
направлением на УТ и горизонтальной плоскостью.
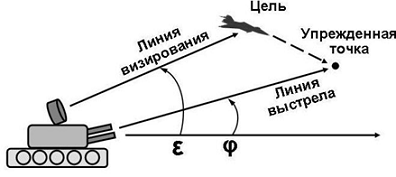
Рис. 4.
Углы в вертикальной плоскости
Углы качки
установки (рис.
5)
Угол
галопирования Ψ - это угол поворота
установки в продольной плоскости. Угол Ψ положителен, когда передняя часть
установки выше задней.
Угол
потаптывания Θ - это угол поворота
установки в поперечной плоскости. Угол Q положителен, когда левый борт установки
выше правого.
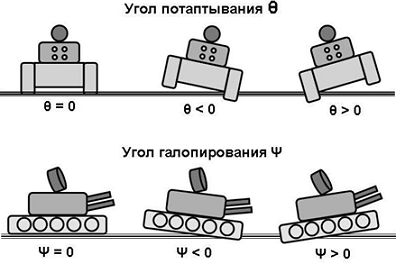
Рис. 5.
Углы качки ЗСУ-23-4
Полные углы
наведения АЗП (рис.
6)
Угол
Q – полный угол наведения АЗП-23 по
вертикали.
Угол
Φ – полный угол наведения АЗП-23 по
горизонтали;
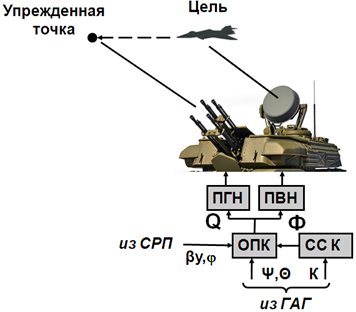
Рис. 6.
Полные углы наведения АЗП-23
Пределы
работы системы стабилизации:
- по углу продольной качки самохода (углу галопирования)
Ψ- ± 10°;
- по углу поперечной качки самохода (углу потаптывания)
θ - ± 10°;
- по углу курса ЗСУ К -
неограниченно.
2. Работа
системы стабилизации
Гироазимутгоризонт (ГАГ) (рис. 7) – центральный прибор системы стабилизации,
предназначен для измерения углов продольной и поперечной качки Ψ, θ, а также
угла курса К установки.
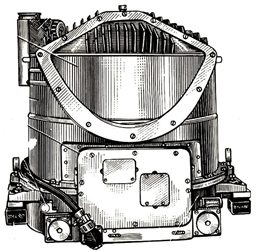
Рис. 7.
Гироазимутгоризонт
При работе ГАГ создается горизонтальная
стабилизированная площадка (гирогоризонт), относительно которой
измеряются углы продольной и поперечной качки Ψ, θ. Кроме этого, ГАГ создает
неподвижное ориентированное направление (гироазимут), относительно которого
измеряется угол курса К установки.
Измеренные углы в виде электрических напряжений
поступают в орудийный и визирный преобразователи координат для стабилизации
линии визирования и линии выстрела.
РЛС 1РЛ33 сопровождает
воздушную цель и определяет ее координаты – β, ε и Д (рис. 8), которые поступают
в СРП. СРП решает задачу встречи снаряда с целью и определяет координаты
упрежденной точки – βу и φ.
Эти координаты поступают на орудийный преобразователь координат
Туда же с ГАГ поступают углы продольной и поперечной качки самохода Ψ, θ, а
также со следящей системы К - угол курса К.
ОПК вырабатывает полные углы вертикального и
горизонтального наведения пушки Ф и Q, которые отрабатываются приводами
наведения. В результате этого стволы пушки постоянно наводятся в упрежденную
точку с учетом углов поперечной и продольной качки
самохода.
В визирный
преобразователь координат с антенны РЛС
поступают угловые координаты цели - β и ε. Кроме этого, туда же поступают углы
продольной и поперечной качки самохода Ψ, θ и угол курса
К.
ВПК вырабатывает углы доворота антенны Δε и Δq. Эти углы
отрабатываются следящими приводами стабилизации Δε и Δq, тем самым ось антенны
удерживается неподвижной относительно земли при качке и рыскании ЗСУ.
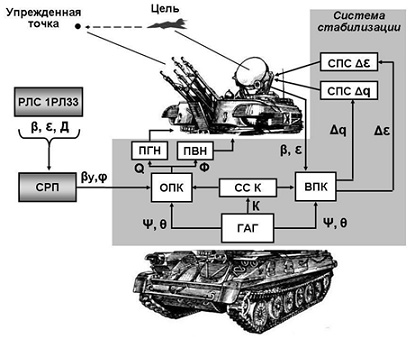
Рис. 8. Функциональная схема системы
стабилизации
Органы
управления и контроля системы
стабилизации расположены на пульте командира (рис. 9)

Рис. 9. Органы управления и контроля системы стабилизации на пульте командира

Тестовое задание
для решения задачи встречи снаряда с целью при управлении огнем АЗП-23
для определения дальности до цели и выработки текущих координат цели при движении ЗСУ
для сохранения неизменным направления антенны и стволов пушки при движении ЗСУ
орудийный преобразователь координат
гироазимутгоризонт
следящий привод стабилизации
стабилизацию линии визирования и линии выстрела
стабилизацию огня АЗП-23
стабилизацию линии визирования и линии горизонта
20°
30°
40°