10. Аппаратура оценки зоны ЗРК «Стрела-10»
1. Назначение, состав, характеристики и устройство
аппаратуры оценки зоны
Аппаратура
оценки зоны (АОЗ) 9С86 предназначена
для:
- автоматического определения положения цели
относительно зоны пуска ракеты и выработки команды ЗОНА;
- вычисления углов упреждения ПУ, необходимых для пуска
ракеты в упрежденную точку;
- выработки и выдачи в автопилот ракеты команды НАЗАД
при стрельбе по целям на догонном курсе и малоскоростным целям на встречном
курсе.
АОЗ
представляет собой импульсный радиолокационный дальномер и включает в себя (рис.
1):
- антенное устройство (прибор А) – размещено на люльке
ПУ;
- литерный приемо-передатчик (прибор ЛПП) – на люльке
ПУ;
- блок управления и контроля (прибор У) – слева за
спиной оператора;
- измеритель СКОРОСТЬ-ДАЛЬНОСТЬ (прибор СД) – под
сиденьем оператора;
- вычислитель зоны (прибор ВЗ) – слева от прибора
СД;
- накопитель сигналов (прибор НС) – справа от прибора
СД;
- вычислитель упреждения (прибор ВУ) – справа за спиной
оператора;
- помпу воздушную (блок ПВ) – в станке
ПУ;
- пульт оперативного управления (прибор ПОУ) - слева от оператора.
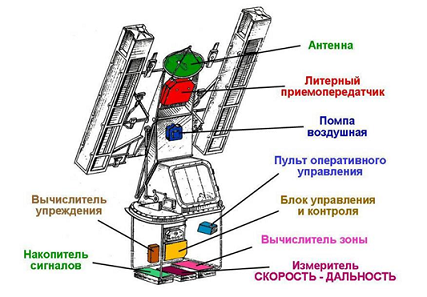
Рис. 1.
Размещение элементов аппаратуры оценки зоны
Антенное
устройство (прибор А) (рис.2)
предназначено для формирования диаграммы направленности, излучения зондирующего
импульса и приема отраженного от
цели сигнала.
Литерный
приемопередатчик (рис.2) – для
формирования зондирующих импульсов , импульсов нулевой дальности, сигнала
«Начало измерений», преобразования и предварительного усиления отраженных
сигналов и обеспечения работы схемы АПЧ.

Рис. 2.
Пусковая установка.
Блок
управления и контроля (прибор У)
(рис.3) – для усиления отраженных от цели сигналов, обеспечения работы механизма
перестройки частоты клистрона, контроля работоспособности аппаратуры и
управления работой приборной части.

Рис. 3.
Рабочее место оператора.
Измеритель
СКОРОСТЬ-ДАЛЬНОСТЬ (СД) (рис.4) - для обеспечения точного измерения
дальности до цели

Рис. 4.
Рабочее место оператора.
Вычислитель
зоны (рис.5) – для вычисления границ зоны пуска ракет
и сравнение дальности до цели с вычисленными значениями границ зоны пуска и
выработки сигнала «Зона».
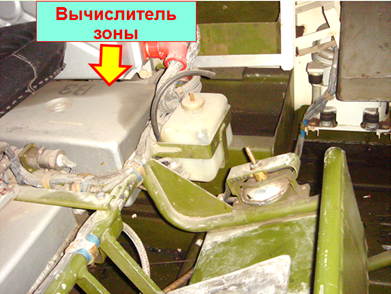
Рис. 5.
Рабочее место оператора.
Накопитель
сигналов (НС) (рис.6) - для выделения полезного сигнала на фоне
несинхронных импульсных помех и внутренних шумов приемной системы.

Рис. 6.
Рабочее место оператора.
Вычислитель
упреждений (ВУ) (рис.7) определяет углы упреждения ПУ для пуска
ракеты в УТ.
Он начинает работу при поступлении из АЗ сигнала
СЛЕЖЕНИЕ. На его вход из АЗ поступают сигналы об угловой скорости цели в горизонтальной и вертикальной
плоскости.
С выхода ВУ по команде ПУСК вычисленные упреждения
поступают в АЗ. ПУ отрабатывает эти углы в горизонтальной и вертикальной
плоскостях и наводит ракету перед пуском в упрежденную точку.
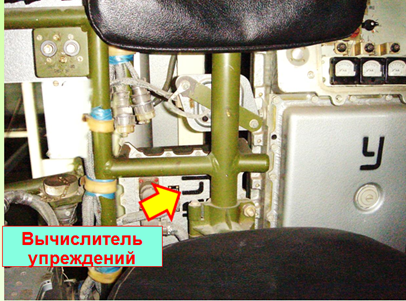
Рис. 7.
Рабочее место оператора.
Помпа
воздушная (рис.8) предназначена для создания в волноводном
тракте избыточного давления воздуха в целях исключения возможности
электрического пробоя в волноводе.
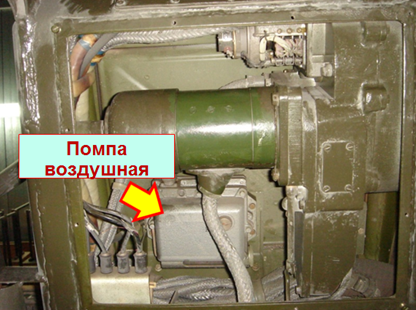
Рис. 8.
Станок пусковой установки.
Пульт
оперативного управления
(ПОУ) (рис.9) предназначен для
включения, переключения режимов и выключения АОЗ.

Рис. 9.
Пульт оперативного
управления.
Аппаратура
оценки зоны
обеспечивает:
- работу по целям, летящим на высотах от 25 до 3500 м,
при скоростях до 400 м/с;
- измерение дальности до цели при углах возвышения ПУ
более 1,5° в пределах от 450 до 10 000 м;
- измерение радиальной составляющей скорости цели до 400
м/с;
- определение нахождения цели в зоне
пуска;
- вычисление углов упреждения ПУ;
- выдачу сигналов ЗОНА и НАЗАД.
2. Принцип
работы аппаратуры оценки зоны
Передающая система формирует зондирующие импульсы,
которые через антенно-волноводную систему поступают к антенне и излучаются в
направлении воздушной цели (рис. 10).
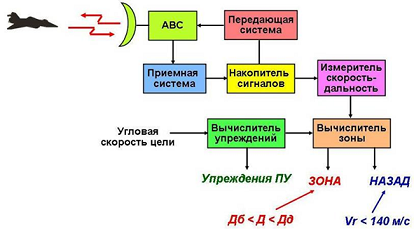
Рис.
10. Функциональная схема
аппаратуры оценки зоны
Отраженные от цели сигналы принимаются антенной и
поступают в приемную систему, где преобразуются в видеоимпульсы и усиливаются. В
накопителе сигналов видеоимпульсы выделяются на фоне несинхронных импульсных
помех и собственных шумов приемной системы. Далее они поступают в измеритель
СКОРОСТЬ - ДАЛЬНОСТЬ, где определяется дальность до цели и радиальная
составляющая скорости. Эти данные поступают в вычислитель зоны, который
вычисляет дальнюю Дд и ближнюю Дб границы зоны пуска.
Если дальность до цели Д соответствует условию Дб < Д
< Дд, то вычислитель зоны вырабатывает сигнал ЗОНА, который поступает в АЗ для
разрешения пуска ракеты. При этом в визирном устройстве оператора загорается
лампочка ЗОНА.
Если радиальная составляющая скорости цели меньше 140
м/с, то вычислитель зоны вырабатывает команду НАЗАД, которая подается в
автопилот ракеты для обеспечения наведения по целям на догонном курсе и
малоскоростным целям на встречном курсе.
Вычислитель
упреждений (ВУ) определяет углы
упреждения ПУ для пуска ракеты в упрежденную точку. Он начинает работу при
поступлении из АЗ сигнала СЛЕЖЕНИЕ. На его вход из АЗ поступают сигналы об
угловой скорости перемещения цели в горизонтальной и вертикальной плоскости. С
выхода ВУ по команде ПУСК вычисленные упреждения поступают в АЗ. Пусковая
установка отрабатывает эти углы в горизонтальной и вертикальной плоскостях и
наводит ракету перед пуском в упрежденную точку.
АОЗ работает в трех режимах: дежурном, боевом и режиме
измерений. Режимы включаются соответствующими тумблерами на пульте оперативного
управления (рис. 11).
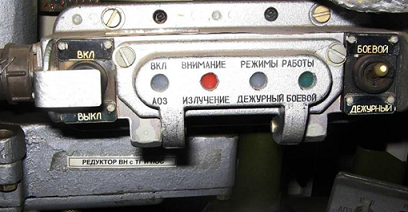
Рис.
11. Пульт оперативного
управления
Дежурный
режим предназначен для подготовки к
включению АОЗ в боевой режим. Время выхода на дежурный режим составляет 3 мин,
что необходимо для прогрева электровакуумных приборов в ЛПП.
Боевой
режим предназначен для подготовки
аппаратуры к режиму измерений. Работает вся аппаратура АОЗ, передатчик
генерирует электромагнитные импульсы, но энергия направляется в эквивалент
антенны. Время выхода на режим составляет не более 15 с.
Режим измерений предназначен для определения положения цели относительно границ зоны пуска и формирования сигналов ЗОНА и НАЗАД. Режим включается автоматически при поступлении из АЗ сигнала СЛЕЖЕНИЕ, при этом происходит переключение аппаратуры АОЗ на излучение в эфир. Время перевода в режим измерений составляет не более 0,2 с.

Тестовое задание
Формирования зондирующих импульсов , импульсов нулевой дальности, сигнала «Начало измерений», преобразования и предварительного усиления отраженных сигналов и обеспечения работы схемы АПЧ.
Формирования амплитудных импульсов , импульсов средней дальности, сигнала «Конец измерений», преобразования и предварительного усиления отраженных сигналов и обеспечения работы схемы АПЧ.
Формирования зондирующих импульсов , импульсов точной дальности, сигнала «Конец измерений», преобразования и предварительного усиления отраженных сигналов и обеспечения работы схемы АПЧ.
автоматического определения положения следящей марки ракеты и выработки команды ЗОНА; вычисления момента закрытия жалюзей двигателя при пуске ракеты.
автоматического определения положения цели относительно зоны пуска ракеты и выработки команды ЗОНА; вычисления углов упреждения ПУ, необходимых для пуска ракеты в упрежденную точку.
автоматического определения пассивным радиопеленгатором (ПРП) воздушной цели и выработки команды ЗОНА; вычисления наземным радиолокационным запросчиком государственной принадлежности воздушной цели.
Измерения дальности до цели относительно границ зоны пуска и формирование сигналов ЗОНА и НИЗ.
Измерения угла упреждения до цели относительно границ зоны пуска и формирование сигналов ПУСК и НАЗАД.
Определения положения цели относительно границ зоны пуска и формирование сигналов СЛЕЖЕНИЕ и ПУСК.
Для формирования зондирующих импульсов, импульсов нулевой дальности, сигнала «Начало измерений», преобразования и предварительного усиления отраженных сигналов и обеспечения работы схемы АПЧ.
Усиления отраженных от цели сигналов, обеспечения работы механизма перестройки частоты клистрона, контроля работоспособности аппаратуры и управления работой приборной части.
Для обеспечения точного измерения дальности до цели.
Измерение радиальной составляющей скорости цели до 400 м/с и выдачу сигналов ЗОНА и НАЗАД.
Определение нахождения цели в зоне пуска и вычисление углов упреждения ПУ.
Все выше перечисленные пункты.